Overview
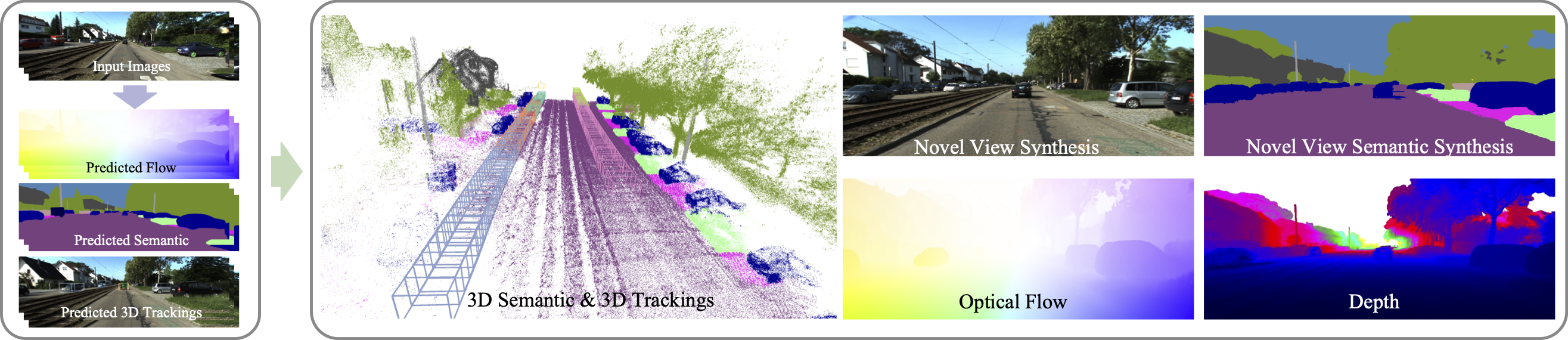
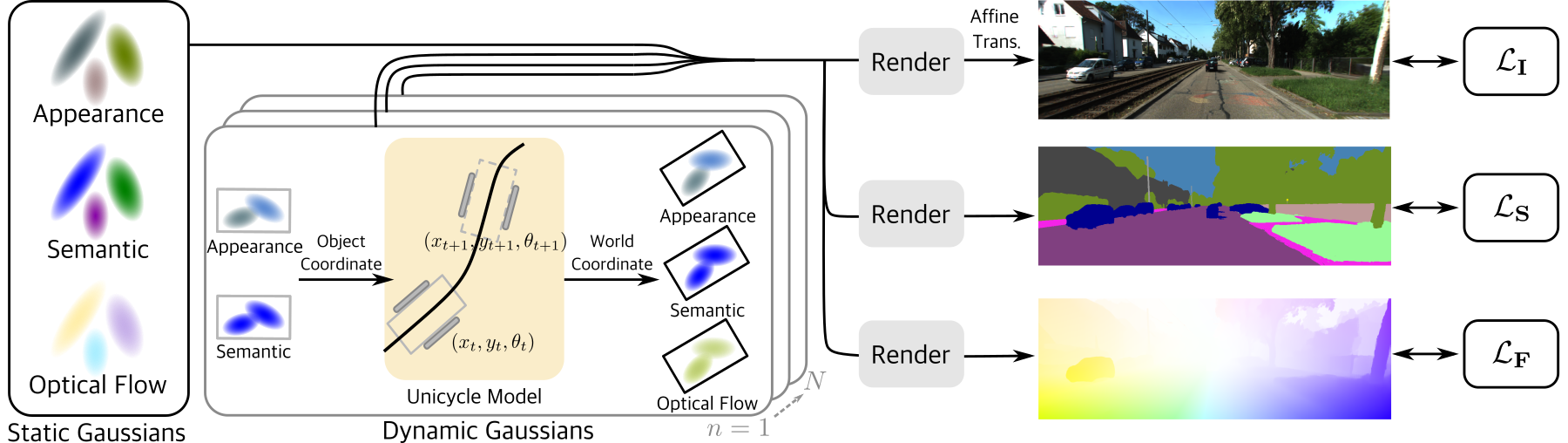
We present HUGS, a novel pipeline that utilizes 3D Gaussian Splatting for holistic urban scene understanding. Our main idea involves the joint optimization of geometry, appearance, semantics, and motion using a combination of static and dynamic 3D Gaussians, where moving object poses are regularized via physical constraints. Our approach offers the ability to render new viewpoints in real-time, yielding 2D and 3D semantic information with high accuracy, and reconstruct dynamic scenes, even in scenarios where 3D bounding box detection are highly noisy.